Apareamiento Estereoscópico
Reconstruccion Tridimensional
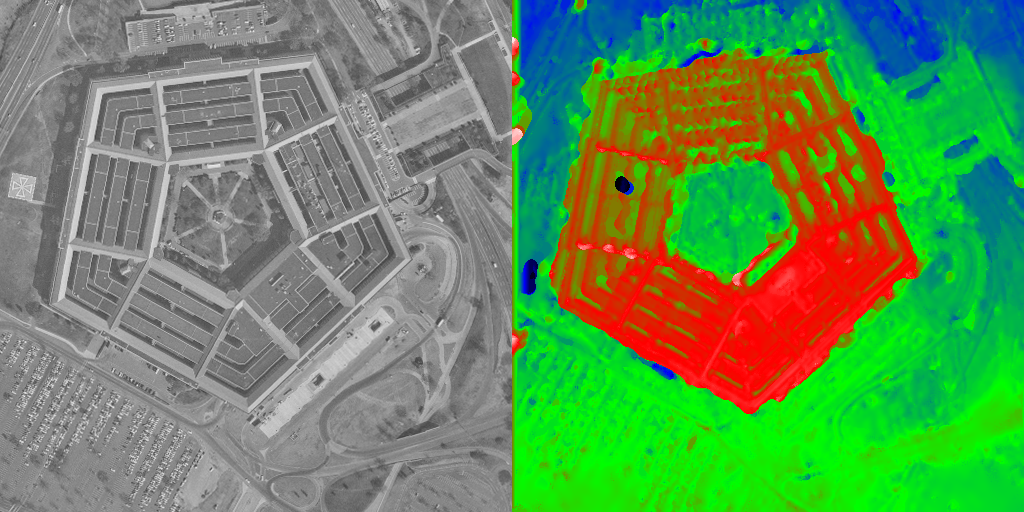
Método de apareamiento estereoscópico para obtener un mapa de disparidad denso y detallado en sub-píxel a partir de un par de imágenes rectificadas. El par de imágenes se comparan por medio de una ventana, cuyo diámetro varia en función de la cantidad de textura dentro de ella. Dicha ventana calcula el costo de apareamiento , los valores de apareo se mejoran encontrando el valor mínimo de la función de segundo grado descrita por los costos de apareo próximos al mejor valor encontrado, obteniendo así un mapa de disparidad en sub-píxel. Finalmente se corrigen los malos apareamientos mediante un filtro de mediana condicional.
Imagen Izquierda

La entrada al algoritmo estereoscópico son dos imágenes rectificadas, derecha e izquierda.
Imagen Derecha

La entrada del algoritmo estereoscópico son dos imágenes rectificadas, derecha e izquierda.
Apereamiento Estereoscópico
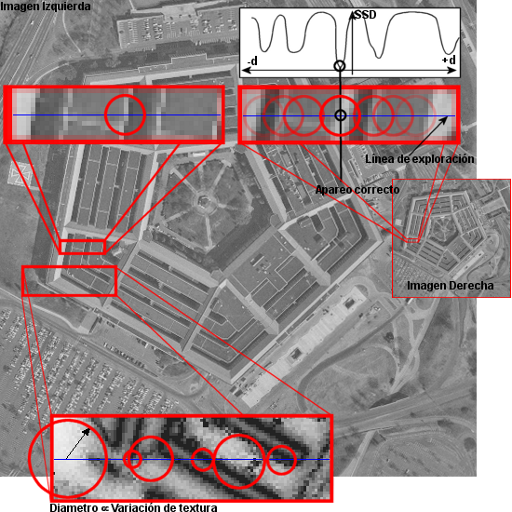
Para encontrar la correspondencia de una imagen respecto a la otra, utilizamos una ventana circular centrada en la imagen de interés en y otra de igual área en la segunda imagen cuyo centro será desplazado sobre la línea de exploración, dentro de un rango de disparidad. Se utiliza la sumatoria de las diferencias al cuadrado para determinar el apareamiento.
Mapa de profundidad
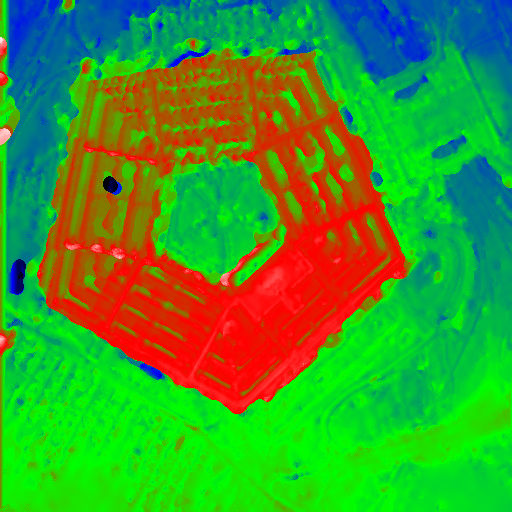
Los valores de apareamiento se mejoran encontrando el valor mínimo de la función de segundo grado descrita por los costos cerca del mejor valor encontrado, obteniendo así un mapa de disparidad de subpíxeles. Finalmente, las malas coincidencias se corrigen mediante un filtro de mediana condicional.
Reconstrucción Tridimensional
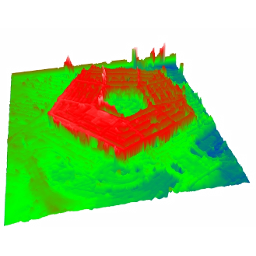
Three-dimensional representation of the disparity map.
Articulo Científico

Percepción de Profundidad: Apareamiento Estereoscópico.
7º Congreso Interamericano de Computación Aplicada a la Industria de Procesos.
CAIP’2005Vila Real, Portugal.