Stereo Matching
Tridimensional Reconstruction
Stereoscopic matching method to obtain a dense and detailed sub-pixel disparity map from a pair of rectified images. The pair of images are compared through a window, whose diameter varies depending on the amount of texture within it. The window calculates the matching cost, the matching values are improved by finding the minimum value of the second degree function described by the matching costs close to the best value found, thus obtaining a sub-pixel disparity map. Finally, bad matches are corrected using a conditional median filter.
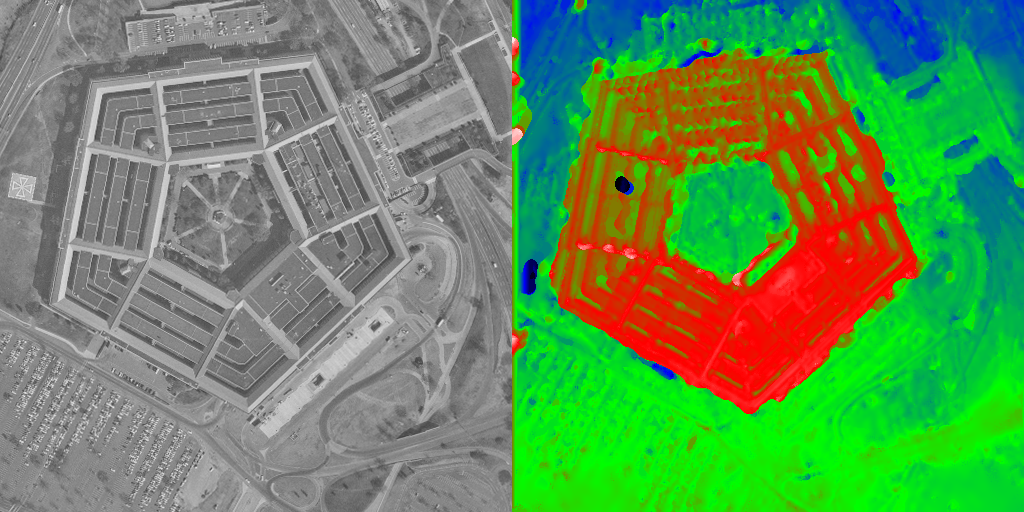
Left Image

The input to the stereoscopic algorithm is two rectified images, right and left.
Right Image

The input of the stereoscopic algorithm is two rectified images, right and left.
Stero Matching
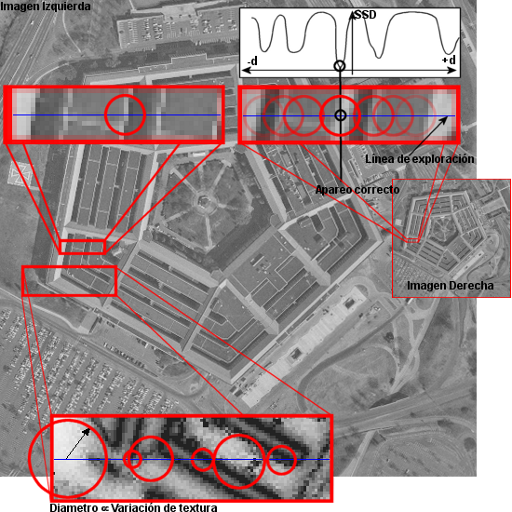
To find the correspondence of one image with respect to the other, we use a circular window centered on the image of interest and another of equal area in the second image whose center will be displaced on the scan line, within a range of disparity. The sum of the squared differences is used to determine the pairing.
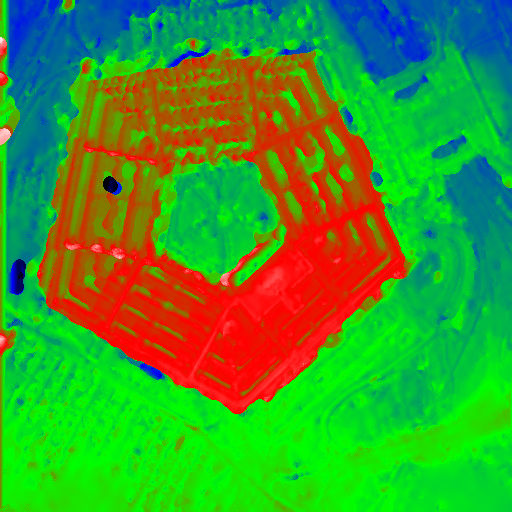
Depth Map
The matching values are improved by finding the minimum value of the second degree function described by the matching costs close to the best value found, thus obtaining a sub-pixel disparity map. Finally, bad matches are corrected using a conditional median filter.
Tridimiensional Reconstruction
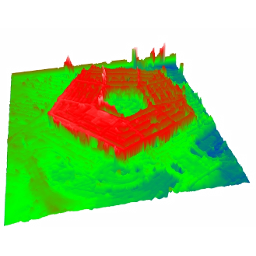
Representación tridimensional del mapa de disparidad.
Research Paper

Percepción de Profundidad: Apareamiento Estereoscópico.
7º Congreso Interamericano de Computación Aplicada a la Industria de Procesos.
CAIP’2005Vila Real, Portugal.